unit 6 - rotational motion
2/25/19
center of mass
a point representing the mean position of the matter in a body or system
point object : assume all mass is located at one point
extended object : assume all mass is distributed throughout the object
hang test : a way to find the center of mass
- hang object from a point and draw a vertical line straight down
- hang the object again from a different point then draw another vertical line
- where the intersect is the center of mass
2/25/19
center of mass
a point representing the mean position of the matter in a body or system
point object : assume all mass is located at one point
extended object : assume all mass is distributed throughout the object
hang test : a way to find the center of mass
- hang object from a point and draw a vertical line straight down
- hang the object again from a different point then draw another vertical line
- where the intersect is the center of mass
http://hyperphysics.phy-astr.gsu.edu/hbase/tord.html
|
|
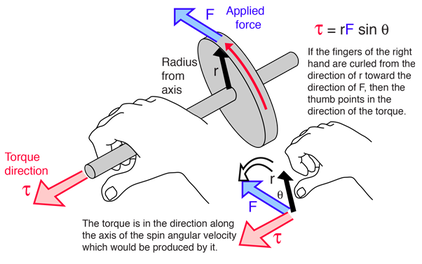
right hand rule
use your right hand to trace the vector and the thumb points in the direction of the torque
out of the page = towards you / up
into the page = away from you / down
rule 2.0 - use your pointer and middle fingers to represent force and torque arm and your thumb is the direction of the torque
rotational kinematics
one rotation = one revolution = 360 degrees = 2(pi)radius
symbols and their meaning
θi = initial angular position
θf = final angular position
change in θ = displacement
ω = angular velocity
α = angular acceleration
equations
ω = ωo + αt
change in θ = ωo(change in t) + 1/2α(change in t)^2
ω^2 = ωo^2 + 2α(change in θ)
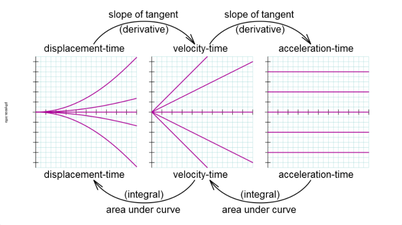
*the graphs are related in the same way as linear kinematics the variable for the value is just switched
use your right hand to trace the vector and the thumb points in the direction of the torque
out of the page = towards you / up
into the page = away from you / down
rule 2.0 - use your pointer and middle fingers to represent force and torque arm and your thumb is the direction of the torque
rotational kinematics
one rotation = one revolution = 360 degrees = 2(pi)radius
symbols and their meaning
θi = initial angular position
θf = final angular position
change in θ = displacement
ω = angular velocity
α = angular acceleration
equations
ω = ωo + αt
change in θ = ωo(change in t) + 1/2α(change in t)^2
ω^2 = ωo^2 + 2α(change in θ)
*the graphs are related in the same way as linear kinematics the variable for the value is just switched
https://kaiserscience.wordpress.com/physics/kinematics/interpreting-d-t-and-v-t-graphs/
|
|
torque
a torque is a push or a pull that attempts to change the rotation of the object
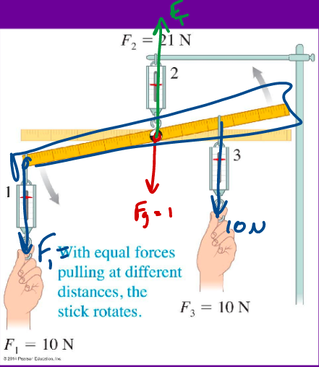
- forces can cause a rotation or a change in objects rotation, even if the forces are balanced
- for example two equal forces can pull on a ruler and rotate it because they are at different distances
extended force diagrams : diagram shows where forces act on the object and allows us to determine the change in velocity and rotation
position of force : further from the fulcrum (point of rotation) increases the ability to rotate
angle of force : the closer the angle is to being perpendicular the greater the torque
T = F * r * sin(θ) = F(perpendicular) x radius
static equilibrium : the net torque = 0 and the net force = 0
a torque is a push or a pull that attempts to change the rotation of the object
- forces can cause a rotation or a change in objects rotation, even if the forces are balanced
- for example two equal forces can pull on a ruler and rotate it because they are at different distances
extended force diagrams : diagram shows where forces act on the object and allows us to determine the change in velocity and rotation
position of force : further from the fulcrum (point of rotation) increases the ability to rotate
angle of force : the closer the angle is to being perpendicular the greater the torque
T = F * r * sin(θ) = F(perpendicular) x radius
static equilibrium : the net torque = 0 and the net force = 0
|
for the picture to the left : https://onedrive.live.com/redir?resid=2DD6E6A9C9E29692%214495&authkey=%21AOoRX0B_EwpVCio&page=View&wd=target%286%20Rotation.one%7C5d218f59-16d9-4e73-85da-99b103a025e7%2F02%20Torque%7C828e0e7d-ded2-40e4-86ca-7d09b48ca469%2F%29
|
rotational inertia and energy
rotational inertia : physical quantity characterizing the location of the mass relative to the axis of rotation of the object
- closer the mass of the object is to the axis of rotation easier it is to change the rotational motion and the smaller the rot. inertia
- the magnitude depends on both the total mass of the object and the distribution of mass about its axis of rotation
newtons 2nd law : one or more objects exert forces on a rigid body with rotational inertia, I, that can rotate about some axis. the sum of the torques due to these forces about that axis causes the object to have rotational acceleration
rotational kinetic energy :
energy from the rotation of an object
rotational kinetic energy of an object with rotational inertia turning with rotational speed is
K(rotational) = 1/2( I ) x ω^2
rotational inertia : physical quantity characterizing the location of the mass relative to the axis of rotation of the object
- closer the mass of the object is to the axis of rotation easier it is to change the rotational motion and the smaller the rot. inertia
- the magnitude depends on both the total mass of the object and the distribution of mass about its axis of rotation
newtons 2nd law : one or more objects exert forces on a rigid body with rotational inertia, I, that can rotate about some axis. the sum of the torques due to these forces about that axis causes the object to have rotational acceleration
rotational kinetic energy :
energy from the rotation of an object
rotational kinetic energy of an object with rotational inertia turning with rotational speed is
K(rotational) = 1/2( I ) x ω^2
|
|
|
angular momentum and impulse
angular momentum : L = I x ω
- an objects resistance to stop rotating
- a conserved quantity in isolated systems
- angular impulse causes angular momentum
in a isolated system
- rot.inertia increases angular speed decreases
-rot.inertia decreases angular speed increases
in a non-isolated system
- a large torque exerted for a short time or a large torque
exerted for a short time will increase angular momentum
angular momentum : L = I x ω
- an objects resistance to stop rotating
- a conserved quantity in isolated systems
- angular impulse causes angular momentum
in a isolated system
- rot.inertia increases angular speed decreases
-rot.inertia decreases angular speed increases
in a non-isolated system
- a large torque exerted for a short time or a large torque
exerted for a short time will increase angular momentum
|
|
|
